

视觉系统的设计师们,在遇到水果、豆类、谷物等常见分拣应用时,常会问我们: “棱镜式相机比三线相机更好吗?为什么呢?”
下面,我们就来分析一下。
用来进行自动检测的分拣设备,它会根据预设的颜色、大小、形状、结构参数准确地对物体进行分拣,判定检测对象合格与否。这是一种能够同时保证质量和最大产量的经济高效的解决方案。
在这样的应用中,检测对象的大小、长度各异,且往往都在连续高速的移动。这种情况下,过去一般会选择线阵扫描相机,它的主要特点是逐行扫描,能较好地发现对象的具体缺陷。
线阵扫描相机大致可分为两类:
- 单传感器多线相机。常见配置有双线插值彩色、RGB三线线阵、RGB+NIR多光谱四线线阵等。
- 多传感器棱镜相机。主要配置有3通道(R-G-B)和4通道(R-G-B-NIR)。线阵传感器安装在棱镜块上,光线分离发生在棱镜内部,因此光学分辨率保持不变。
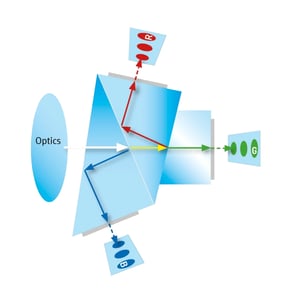
光线在棱镜块内的分离
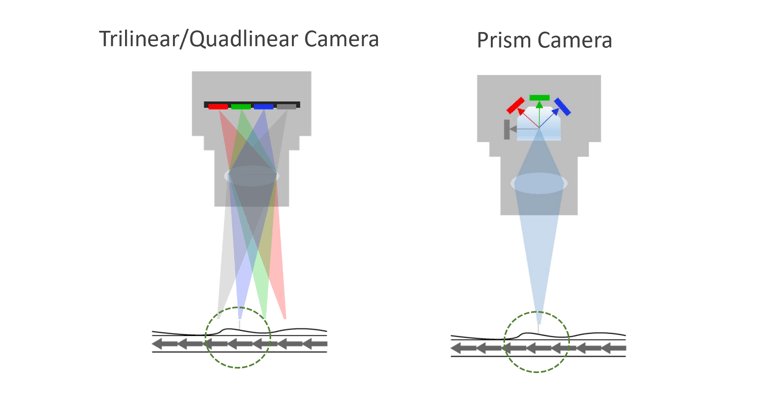
两种线阵扫描相机都可进行高速拍摄,但画质差别很大。棱镜式相机推荐用于检测对象的速度、位置、方向不可确定的分拣系统。
速度多变或不可确定的情况:
当检测对象进行随机的滚动和移动,导致其方向和位置发生轻微变化时,很难捕捉图像。
三线相机的传感器包括三条线,每条线对应一种颜色通道,在扫描方向上按空间排布。也就是说,它所拍摄的物体上某一条线的颜色信息,是先后通过传感器三条线分别捕捉,然后再用相机内的算法合成得到的。这种空间补偿算法,不能处理三线捕捉过程中对象物体的方向变化,易导致图像失真或者出现彩色条纹,我们称之为光晕效应。
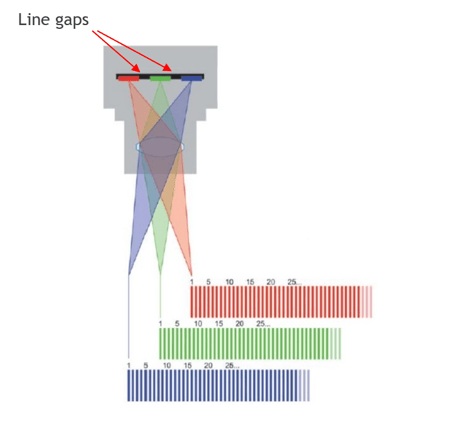
三线相机中的各条线之间有不超过1个像素的间隔,对每种颜色会产生轻微的光学偏差。
而另一方面,在棱镜照相机中,每条光线都对应单一光路。换言之,它⼀次取⼀条光线在内部分割,因此被测对象速度和位置的变化不会影响捕获的颜⾊数据的质量,因为三条线距离被测对象的长度仍然相同。因此,即使被测对象的方向发生变化,棱镜相机中的单一光路可确保每个传感器传感器上的每个像素都同时聚焦在完全相同的点上。
如需了解关于该主题的详细内容,可免费下载本公司的白皮书:《基于棱镜的线阵扫描相机与单传感器多线相机在色彩和多光谱成像方面的比较》。
如需获取更多内容或进行项目设计讨论,请通过我们的网站上的联系表单联系我们。