

果物や豆、穀物の検査など、典型的な選別アプリケーションに携わるビジョンシステムの設計者から、「プリズムカメラはトライリニアカメラよりも優れているのか?それはなぜなのか?」という質問をよく受けますそれでは、
このテーマについて詳しく見ていきましょう。
自動検査に使用される選別選別機は、あらかじめ定義されたパラメータに基づき、色、サイズ、形状、構造の観点から対象物を正確に選別し、合否を判定します。品質を保証しながら最大の歩留まりを達成できる、コスト効率の高いソリューションです。
検査対象物の大きさや長さが異なり、しかも高速で絶えず移動し続けるような用途では、検査対象物を 1 ラインずつスキャンするラインスキャンカメラが、欠陥をよりよく検出するため、選択されてきました。
ラインスキャンカメラは大きく分けて2種類あります。
- シングルセンサマルチラインカメラ: デュアルライン補間カラー、RGBトライリニア、マルチスペクトルアプリケーション用RGB+NIRクアッドリニアなどが典型的な構成です。
- マルチセンサプリズムカメラ: 3チャンネル(R-G-B)および4チャンネル(R-G-B-NIR)の構成が主流です。ラインセンサはプリズムブロックに装着され、プリズム内部で入射光の波長を分離し、正確に位置あわせしたイメージセンサで色を再現します
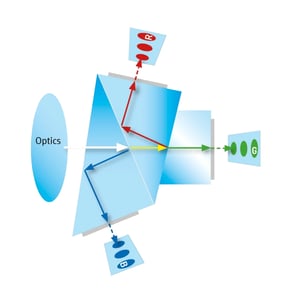 プリズムブロック内の入射光の波長の分離
プリズムブロック内の入射光の波長の分離
どちらのラインスキャンカメラも高速で撮影できますが、画質には大きな差があります。プリズムカメラは、検査対象物の速度、位置、向きが予測できない選別の用途に推奨されます。
速度が変化する、あるいは不明で予測不可能な場合:
不規則な回転や動きをする検査対象物は、向きや位置がわずかに変化するため、撮像が難しくなります。
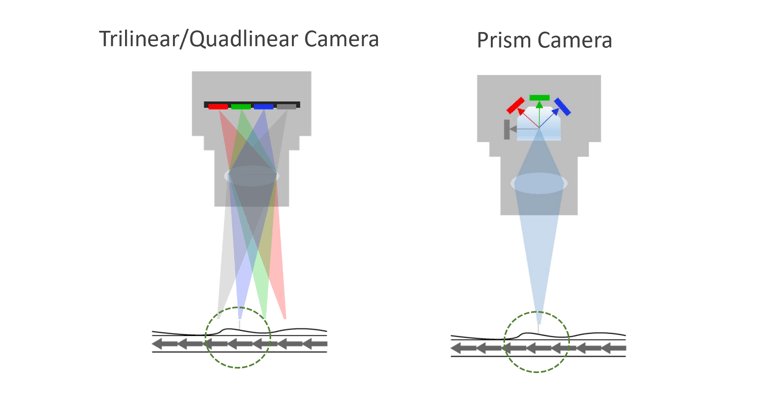
トライリニア式カメラの場合、センサはスキャン対象物に向けて並列に配置された、カラーチャネル別の 3 本のラインで構成されています。
つまり、3 つの異なるポイントで撮像された対象物の特定ラインの色情報を、カメラ内のアルゴリズムで合成しています。
しかし、この空間補正アルゴリズムは3 本ののラインキャプチャの間に被写体の向きが変わることを考慮していないため、画像の歪みや ハロー効果 と呼ばれる色縞が発生してしまうことがあります。
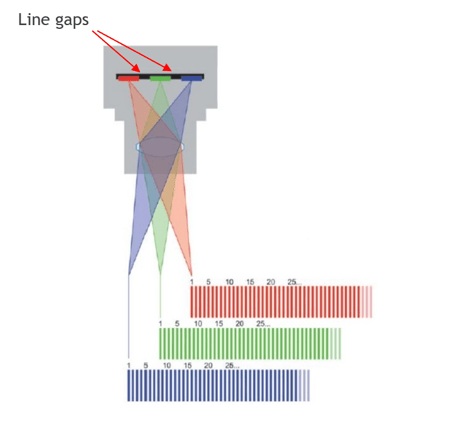
トライリニアカメラでは、個々のラインの間にギャップが存在する。そのギャップは 1 画素以下のこともあり、各色ごとに、わずかな光学的なずれが生じる。
一方、プリズムカメラでは、個々の光線が1本の光路を通ります。つまり、1ラインずつ画像を取り込んで内部で分割するため、速度や位置が変化しても、検査対象物までの距離が同じになるので、撮影したカラーデータの品質に影響が出ることはありません。そのため、対象物の向きが変わっても、プリズムカメラの単一の光路により、各センサの画素が全く同じ位置で同時にフォーカスすることができることができるのです。
このテーマの詳細については、当社の無料 オンデマンドで視聴可能ウェビナー. をご覧下さい。また、 無料ホワイトペーパー: ラインスキャンのカラー/多波長画像処理におけるプリズム分光式カメラと単板マルチラインカメラの比較 もダウンロード可能です。
お気軽にお問合せください:
貴社の高速ラインスキャンのアプリケーションに最適なカメラが必ず見つかります。ぜひJAIにお手伝いさせてください。 JAIの製品エンジニアがいつでもご相談を承ります。