
ラインスキャンカメラを扱うビジョンシステムの設計者であれば、画質についての話題の中で「ハロー」や「ハロー効果」という言葉を聞いたことがあるでしょう。この問題は何を意味するのか、そして適切な対処法を知らないとシステムの動作にどのような悪影響を及ぼすのか、ざっと見てみましょう。
ハロー効果とは?
ハロー効果は、対象物の輪郭が伝送方向に偽色となって現れる画像寸法の歪みです。複数ラインのカラーラインスキャンカメラ(トライリニアまたはクアッドリニア)を軸外の視野角に設置すると、センサ上の各ラインが被写体に対して異なる焦点距離と焦点面を持つようになり、このような現象が発生します。また、振動や対象物の向きの変化といった外的要因によって、異なるラインの色を順次撮影していく際に、各ラインが少しずつ異なる視点から撮影してしまうことがきっかけとなって現れることもあります。ハロー効果により、対象物のエッジの定義精度が低下するため、検査時の誤った解釈を招くおそれがあります。
 ハロー効果と呼ばれる、色位置合わせのわずかな歪み
ハロー効果と呼ばれる、色位置合わせのわずかな歪み
ハロー効果が発生しやすい条件
速度が変化する対象物や転がる対象物の検査
果物やピーマンの選別のような大量・ベルト選別では、対象物はさまざまな速度で移動します。ベルトコンベア上を転がる対象物の位置や向きが微妙に変化する場合、空間補整アルゴリズムではこのような不規則な変化を想定することができません。これにより、画像の歪みや画素データの不正確さが発生し、ハローと呼ばれる色縁が現れます。
また、茶葉や穀物の選別のような自由落下による選別では、落下速度や位置、向きが変化するため、画素ずれを起こしながら撮影していくことになります。
 ハロー効果は、大量選別、ベルト選別、自由落下による選別など、転がる対象物や速度が変化する対象物を扱う用途で発生しやすい
ハロー効果は、大量選別、ベルト選別、自由落下による選別など、転がる対象物や速度が変化する対象物を扱う用途で発生しやすい
速度変化やうねりのある対象物のウェブ検査
プラスチック、金属箔、紙などのウェブ用途によく見られる高速検査では、振動によって色帯の位置がわずかにずれることがあります。補正アルゴリズムは一定の速度と角度に依存するため、これが乱れると画像位置合わせ合わせの問題、ハロー効果が発生します。
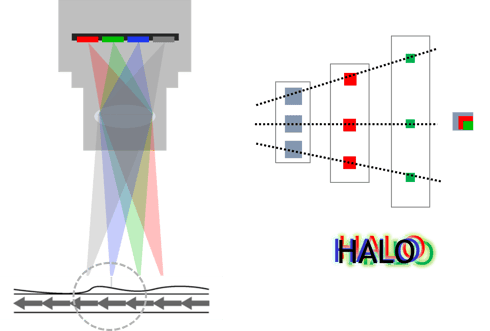
ウェブ検査で頻繁に発生する速度変動や振動は、色帯のわずかなずれや 「ハレーション」と呼ばれる画像位置合わせ合わせの問題を引き起こす原因となる
ハロー効果の解決策
プリズムベースカメラの使用
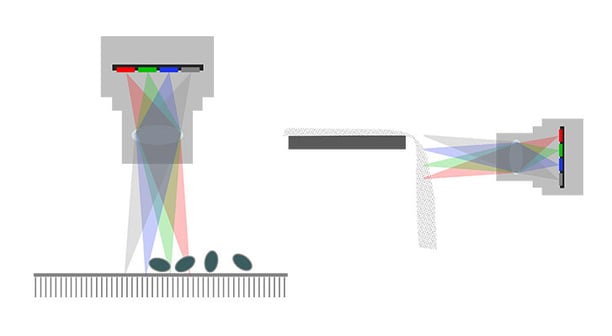
食品選別、粒状廃棄物選別、レーン選別、ベルト選別など、速度、動き、軌道が分かりにくい対象物の検査には、プリズムベースカメラが最適です。
プリズムベースカメラとは?共通光軸を介して光学面が同じになるように、3〜4個のラインセンサをプリズムブロックに取り付けたカメラです。トライリニアやクアッドリニアのようにラインを順次撮影する方式ではなく、プリズム上のカラーフィルターコーティングにより、入射光をセンサごとに別々の波長帯に同時分割して撮影する方式を採用しています。つまり、1ラインずつ撮影してから内部で分割することで、3ラインとも被写体上で同じ長さになるので、速度の変動は撮影したカラーデータの品質に影響しません。同様に、対象物の向きが変わっても、プリズムカメラの単一光学面により、各センサの画素が常に同じ点にピントを合わせるため、きれいな画像が生成されます。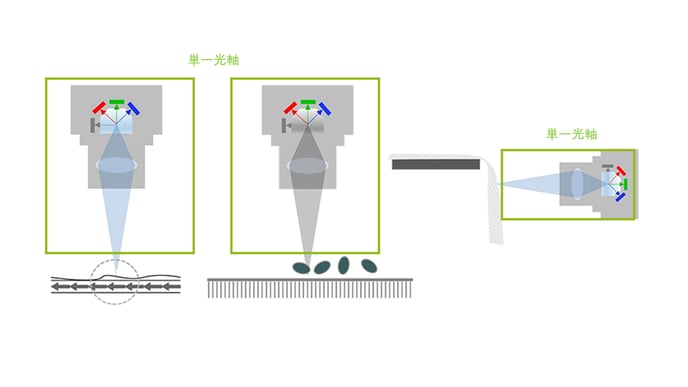 光学面を1つだけ持つプリズムカメラは、各センサの画素が常に同じ点にピントを合わせ、きれいな画像を作り出す
光学面を1つだけ持つプリズムカメラは、各センサの画素が常に同じ点にピントを合わせ、きれいな画像を作り出す
空間補正機能の使用
空間補正は、ほとんどのトライリニアカメラやクアッドリニアカメラに標準搭載されている機能で、1度設定するとそのまま固定されるプリセット調整です。例えばウェブ検査など、被写体が平らで速度変化やうねりが少ない場合、被写体の速度、距離、方向が一定であれば完璧に機能します。ただし、落下する対象物や転がる対象物の検査など、速度、位置、方向が変化する用途では、空間補正の設定を固定化すると効果が低くなるので注意が必要です。
JAIエンジニアにお問い合わせ:
JAIにご相談下さい。高速ラインスキャンのアプリケーション要件を満たすカメラを見つけるお手伝いをいたします。
JAIエンジニアにお問い合わせ