

Vision system designers working on typical sorting applications such as fruit, bean or grain inspection, often ask us, “Are prism cameras better than trilinear cameras, and if so, why?”
Let’s take a closer look at this topic.
Sorting machines are used for automated inspection to accurately sort objects according to color, size, shape and structure based on predefined parameters to determine whether they should be accepted or rejected. This is a cost-effective solution to achieve maximum yield with quality assurance.
For such applications where objects are of varied sizes and lengths, and are continuously moving, usually at a fast speed, line scan cameras, which focus on scanning the object line by line, are traditionally chosen to better detect specific defects.
Line scan cameras can be broadly categorized into two types:
- Single sensor multi-line cameras. Typical configurations include dual-line interpolated color, RGB trilinear, and RGB+NIR quadlinear for multi spectral applications.
- Multi-sensor prism-based cameras. Three channel (R-G-B) and four channel (R-G-B-NIR) configurations are typical. Line sensors are mounted to a prism block and light separation takes place inside the prism, so the optical resolution remains the same.
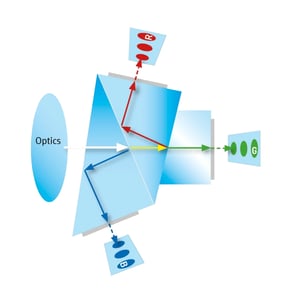 Separation of light inside a prism block.
Separation of light inside a prism block.
While both types of line scan cameras can image at high speeds, the image quality can vary greatly. Prism-based cameras are recommended in sorting applications where the object’s speed, position and orientation are unknown and unpredictable.
When speed varies or is unknown and unpredictable
When objects roll and move randomly leading to slight changes in orientation and position, that can be challenging for image capture.
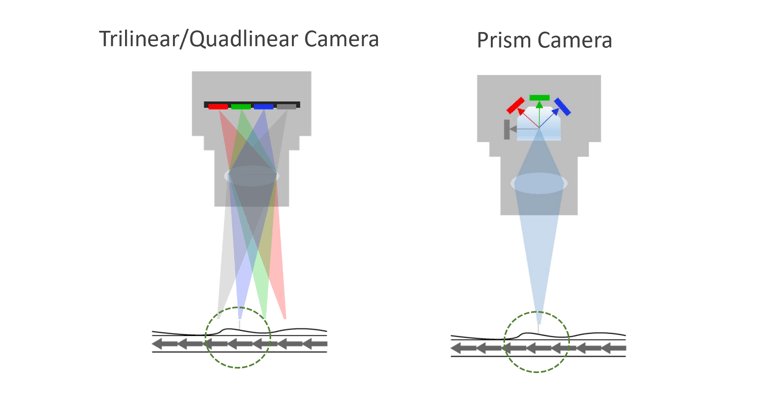
In the case of trilinear cameras, the sensor consists of three lines – one per color channel – which are spatially distributed in the direction of scan. This arrangement means color information from a specific line on the target is captured at three separate points in time and then added together by an algorithm inside the camera. This spatial compensation algorithm is not able to account for changes in orientation of the object that may occur between the three line captures, resulting in image distortion or color fringes known as the halo effect.
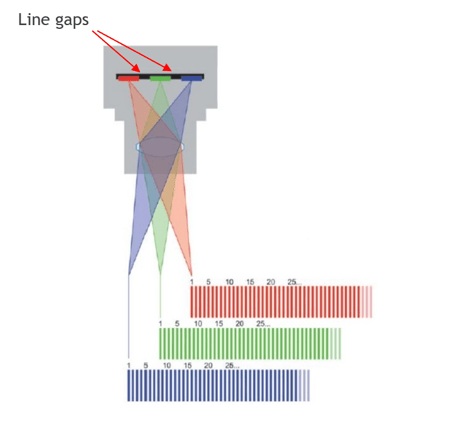
The individual lines in a trilinear camera are separated from each other by a line gap which can be one pixel or smaller, creating a slight optical shift for each of the colors.
On the other hand, in a prism-based line scan camera, every individual light ray follows a single optical path. In other words, they take one line at a time and split this internally, so that all three color channels are derived from the same line capture. So, even if objects change in orientation, the single optical path in prism cameras ensures that each pixel on each sensor is focused on exactly the same point at the same time.
To find out more on this topic, watch our free on-demand webinar. You can also download our free white paper: prism-based line scan cameras vs single-sensor multiline cameras for color and multi-spectral imaging.
Contact JAI for help:
Let us help you to find the perfect camera to meet your application requirements for high speed line scan applications.
Contact a JAI engineer